? ? ?單晶(或多晶)硅太陽能電池片的輸出電壓、電流和功率都很小,只有將它們進行串并聯封裝成組件,才可以單獨作為電源使用。由于電池片尺寸具有多種固定標準,直接串聯、并聯不一定滿足組件需要,因此在焊接前還要切割成更小的單元,行業比較先進的切割方式是采用激光劃片機。
劃片作為組件加工的首道工序,其后續工序如下圖:
SCARA機器人和視覺系統在光伏組件加工上的應用
△光伏組件加工工藝
機器人、視覺系統主要應用于上圖劃片和串焊兩道工藝,給客戶提供快速精準上料解決方案,其中劃片機對上料速度精度要求更高。以國內某家激光加工設備和太陽能成套設備廠商現場應用為例,為其激光劃片機提供的SCARA機器人和AVS一拖二視覺系統,實現了雙工位高速高精度的上料,滿足關鍵指標3000pcs/h、放置誤差+劃片精度<±0.15mm。
No.1
項目概況
該套設備適用于單晶硅和多晶硅太陽電池片任意尺寸劃片,能夠完成自動給料、自動定位、自動激光劃片、自動裝盒等功能,自動化程度高;可選配1/3裂片機構,實現1/3片自動劃片裂片。機器人和視覺系統位于上料工位。
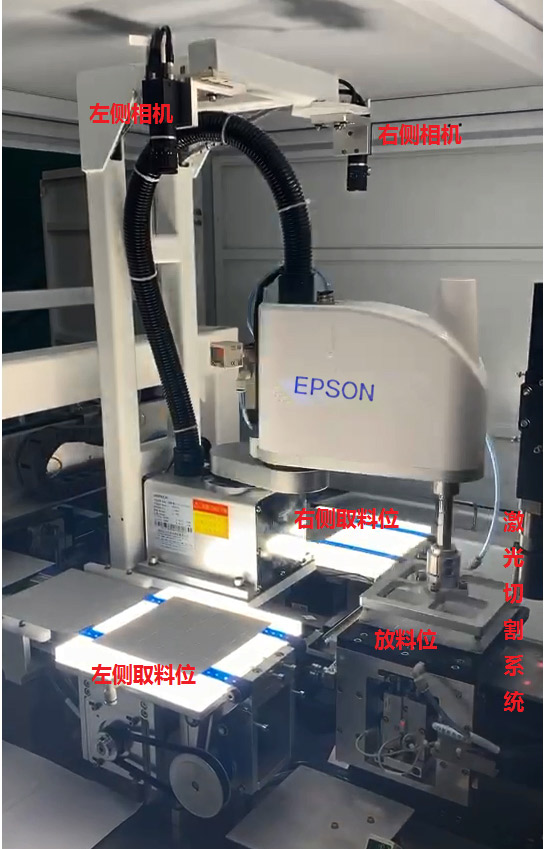
為了提高加工效率,劃片產能要達到3000pcs/h,特別設計了兩條傳送帶同時送料,分別經過視覺系統定位后,由一臺SCARA左右交替快速精準地抓取電池片放置到劃片臺,進行激光劃片。放置誤差+劃片精度在±0.15毫米以內。視覺系統還會對其崩邊、缺角、裂紋、電池片方向等進行檢測,對有問題的來料進行放置廢料盒處理,可以再次加工利用。
SCARA機器人和視覺系統在光伏組件加工上的應用
△結構圖示
No.2
方案構成
取料機器人采用AR3215本體
+QC400驅控一體機;
視覺系統采用AVS2300
一拖二視覺系統,
搭配兩個1000w像素工業相機。
No.3
項目方案和亮點
此項目主要難點在于高精度高速度,要在1.2S內要完成, 視覺定位(不良品篩選)→機器人取料→放料到劃片臺→返回。其中取放料吸破真空時間占用0.3-0.4S,由于電池片易碎,在取放過程需要輕拿輕放,要求機器人快速動作的過程中適時地減速,動作快慢自如。
機器人方面,對軌跡路徑進行了優化,對過程交互IO信號進行了緩存處理,應用機器人系統的多線程機制實現了左側取料右側拍照、右側取料左側拍照,取料拍照互不耽誤的高節拍效果。
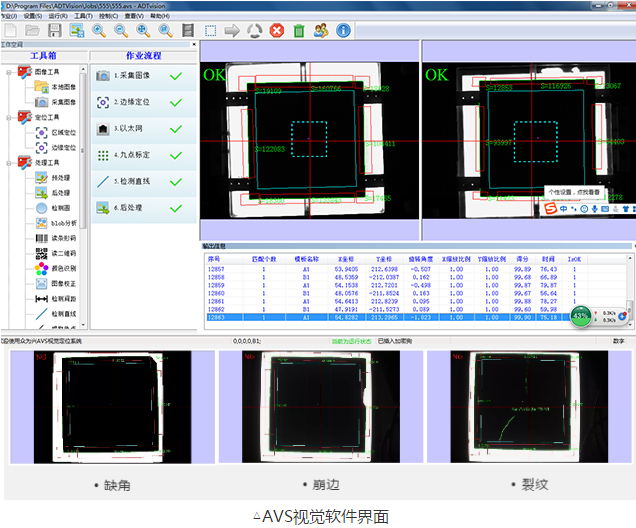
視覺定位方面,要在200mm X 250mm的大視野下實現高精度定位,采用了獨有的自動標定算法,不但簡化了標定流程還提升了標定精度;另外,視覺軟件采用了等比例縮放、找邊找角點等功能提升精度適應不同尺寸電池片切換。視覺缺陷檢測方面,專門開發了電池片檢測模塊,針對電池片缺陷進行檢測。




 訂閱官方微信 了解最新資訊
訂閱官方微信 了解最新資訊

