

優傲機器人
優傲機器人UR3、UR5、UR10協作式工業機器人機械手臂優質經銷商-鎰升機器人

EPSON機器人
EPSON機器人|愛普生機器人,Scara/6軸/控制器
優傲機器人UR3、UR5、UR10協作式工業機器人機械手臂優質經銷商-鎰升機器人
EPSON機器人|愛普生機器人,Scara/6軸/控制器
尊敬的客戶:
近期,有很多使用愛普生機器人的客戶來電咨詢機械手使用的問題,為了更好的充分發揮機器人自身具備的性能,請鎰升機器人的客戶們正確設置負載(夾具末端重量+工件重量)與負載的裝載慣性、離心率設為額定值以內,通過合理的設定,可優化愛普生機器人的PTP動作,抑制振動,縮短作業時間,提高對較大負載的對應能力。
另外,對夾具末端與工件的裝載慣性較大時產生的持續振動也具有抑制效果。請務必設定適合負載的值,如果在夾具末端Weight參數中設定小于實際負載的值,則可能會導致發生錯誤或沖擊,這不僅不能充分發揮性能,而且還可能縮短各機構部件的使用壽命或因皮帶齒輪跳動發生位置間隙的可能性。
下面我們來看看愛普生機械手的正確使用方式:
重量、慣性、離心率的設置
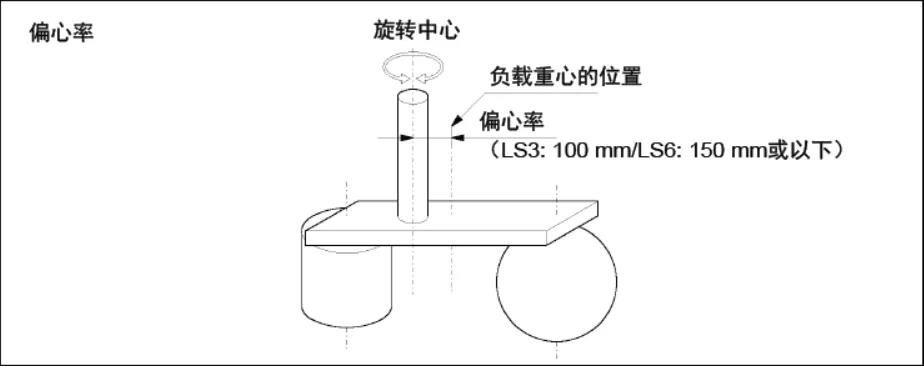
1.SCARA系列離心率的設置:
 六軸系列離心率設置:
六軸系列離心率設置: 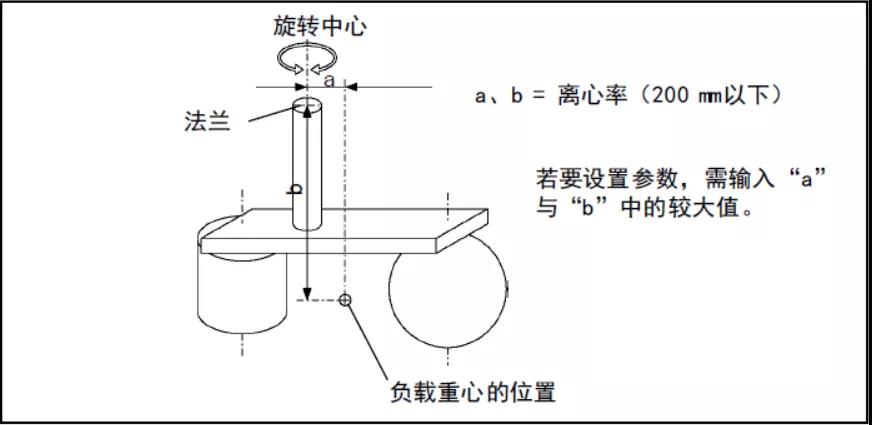 2.末端夾具重量設置:
2.末端夾具重量設置:
末端夾具重量+產品重量
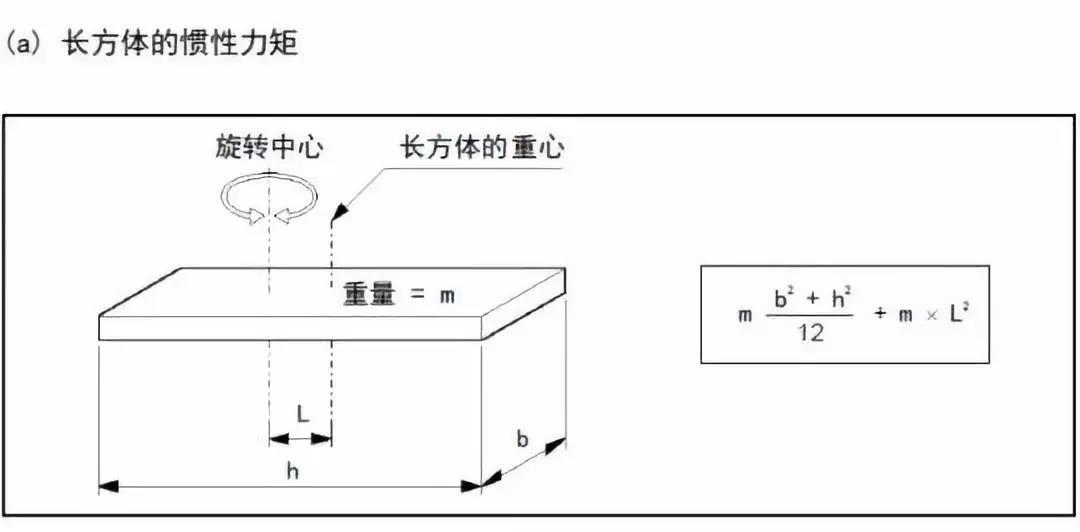
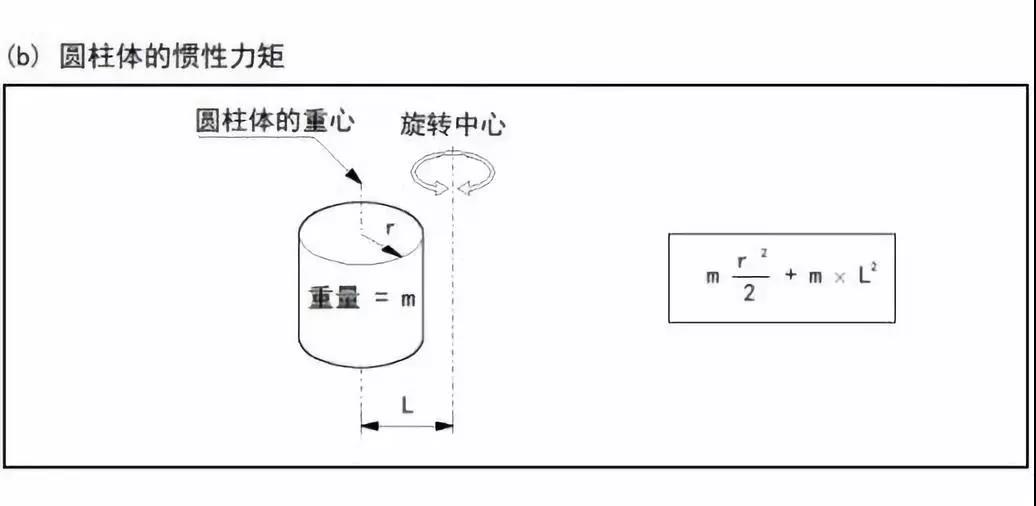
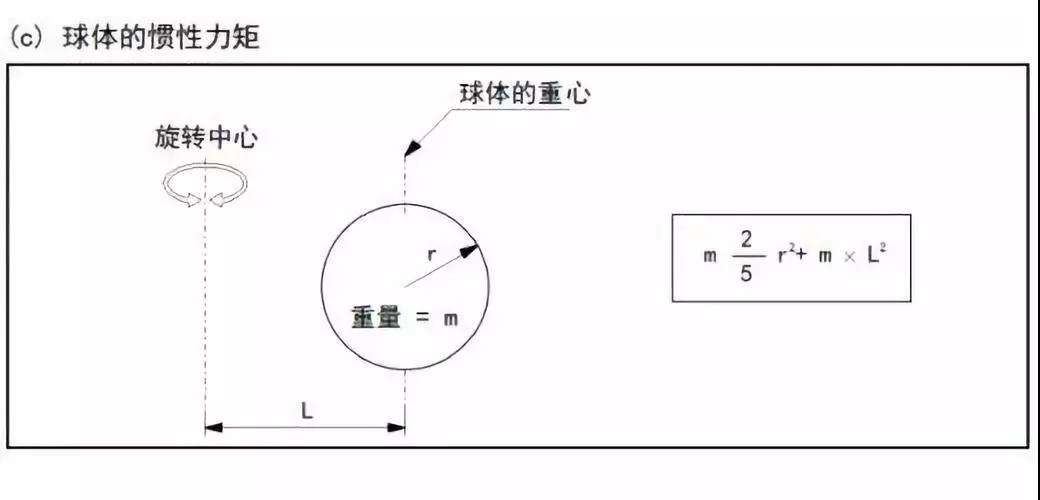
3.負載的裝載慣性設置: 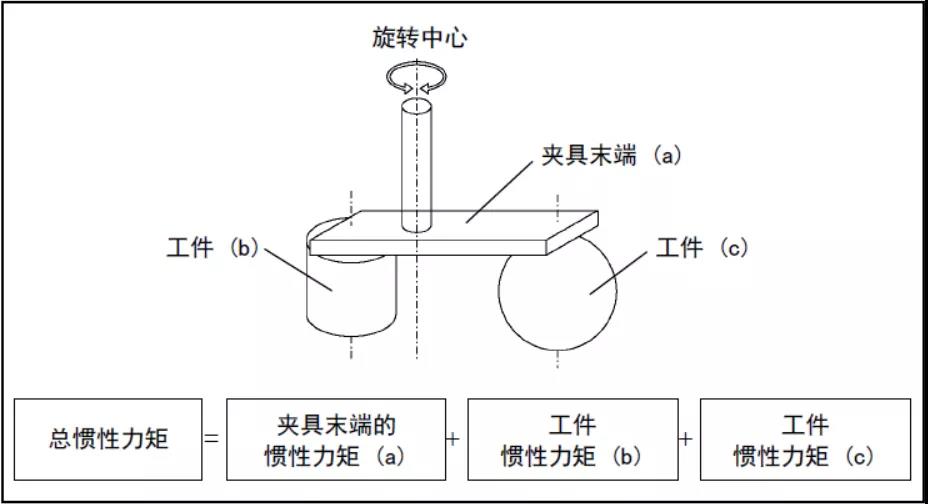
(周一至周五 8:30-18:00)
周末及節假日請聯系18015501787
 訂閱官方微信 了解最新資訊
訂閱官方微信 了解最新資訊
?2018 蘇州鎰升機器人科技有限公司 版權所有蘇ICP備19012241號-1技術支持:
(周一至周五 8:30-18:00)
周末及節假日請聯系18015501787
訂閱官方微信 了解最新資訊
?2018 蘇州鎰升機器人科技有限公司 版權所有蘇ICP備19012241號-1技術支持:

