

優傲機器人
優傲機器人UR3、UR5、UR10協作式工業機器人機械手臂優質經銷商-鎰升機器人

EPSON機器人
EPSON機器人|愛普生機器人,Scara/6軸/控制器
優傲機器人UR3、UR5、UR10協作式工業機器人機械手臂優質經銷商-鎰升機器人
EPSON機器人|愛普生機器人,Scara/6軸/控制器
EPSON工業機器人是工業機器人市場重要的一員,為中國自動化行業的發展做出了重要貢獻。那么設備設計人員該如何進行EPSON機器人的選型呢?以下將做詳細說明。
一般來說,EPSON機器人選型將從以下幾個方面考慮:
1.根據產品、工藝、使用環境確定機器人的類型;是標準型還是潔凈型
2.根據產品的重量(產品或抓手或產品+抓手)、慣量確定機器人的負重水平;
3.根據工作半徑來選擇機器人的臂長;
4.根據工藝要求確定核對機器人的最大速度、精度、IP、ISO、防爆等;
5.根據實際需要選擇外圍設備(如視覺系統、擴展通信口、示教單元、力覺傳感器等)。
接下來展開說明:
1. 根據產品、工藝確定機器人的類型:
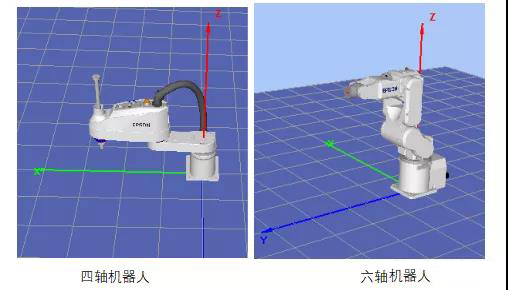
EPSON機器人主要分四軸機器人,也叫桌面機器人,或叫SCARA(Selective Compliance Assembly Robot Arm)和六軸機器人。選型時需要根據產品的工藝確定是需要四軸機器人還是六軸機器人。一般來說,如果作業要求只是平面和上下動作需求,則優選四軸機器人,如果作業要求是空間性質的,即不止簡單的平面和上下動作,還包含任意方向傾斜方向的動作,那么只能選六軸機器人。以下為示意圖。
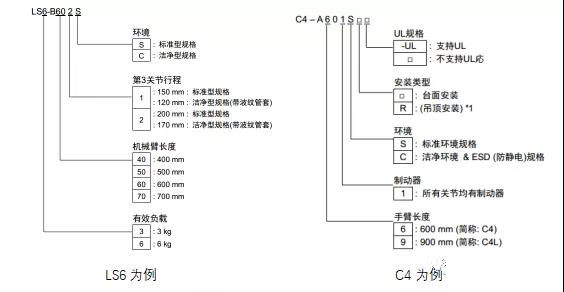
關于EPSON機器人型號的說明:
需要補充說明的是:
①T系列、LS系列只能桌面安裝,G系列支持桌面安裝、吊頂安裝、側壁安裝(型號不同),RS系列為吊頂安裝,C系列支持桌面安裝、吊頂安裝、側壁安裝及任意角度安裝(硬件型號相同,只需要根據安裝方式修改軟件型號配置)
②四軸機器人中,G系列屬于高端機,全進口機器人,價格更高、速度更快;
LS系列/T系列屬于高性價比機型,也是中國市場的主力機型。
至此,我們能初步確定選定四軸還是六軸。
2.根據產品的重量(產品或抓手或產品+抓手)、慣量確定機器人的負重水平:
EPSON機器人末端負載:SCARA:1kg-20kg;
六軸:4kg-12kg。
為了充分發揮機器人自身具備的性能,請先計算負載(夾具末端重量+工件重量)重量,確保選型時,設計負載不要超過機器人有效負載。
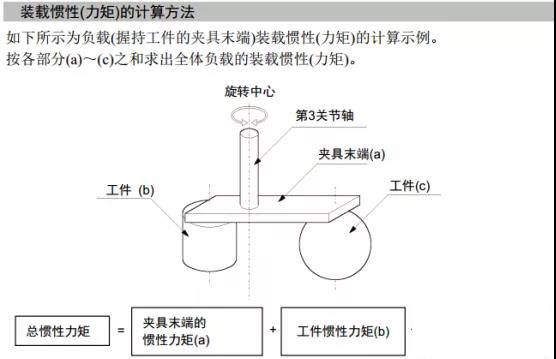
關于機器人末端負載的計算,參考以下計算方式計算:
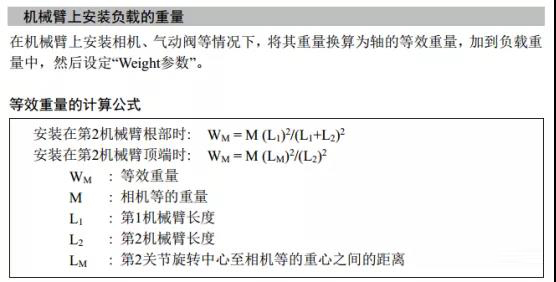
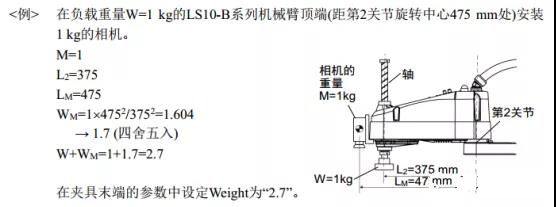
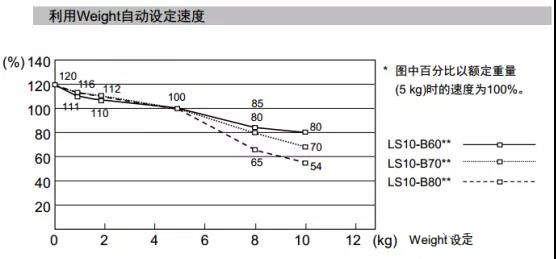
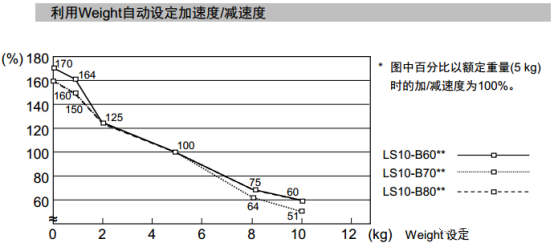
在滿足工況需求的情況下,希望末端重量越小越好。因為設定weight后,會自動設定機器人運動的速度和加減速。重量越小,加減速越快,能達到的最高速度越搞,同樣路徑的CT更短。Weight對速度和加減速的影響曲線如下所示(以LS10為例):
至此,我們對負載的選擇有了初步的認識,那么在機械設計階段,負載盡量輕量化設計成為一種必然。
3.根據工作半徑來選擇機器人的臂長。
第二步確定負載后,接下來就需要確定臂長(即機器人工作范圍的最大半徑,具體完整的工作范圍需要參照對應型號機器人的運動范圍圖)。
EPSON機器人臂長,從175mm-1000mm均有覆蓋,當然,不同負載機器人臂長范圍有所不同,選定負載后,進一步縮小臂長的選擇。比如選定①桌面SCARA②最大負載6kg,那么臂長的選擇就有如下幾種:T6-602S——600mm;
LS6系列——500mm、600mm、700mm;
G6系列——450mm、550mm、650mm.
需要機械工程師根據設備機器人的工作范圍來選定具體哪一款。但注意以下細節部分:
① 比如需要的工作范圍最大540mm,根據上面介紹最合適的是G6 550mm系列,但考慮到G6價格比較貴、貨期比較長,因此也可以考慮LS6-602S(600mm臂展),但600mm臂展需要機臺整體設計的更大,運動過程中還可能有干涉,第二選擇就是LS6-502S(500mm臂展),此時需要增加末端40mm延長桿(如下圖示,尺寸以實際尺寸為準)。當然,因為夾爪偏心會使CT更長(具體原因后面講),到底能否選擇LS6-502S,還需要機器人軟件模擬CT進行測試。
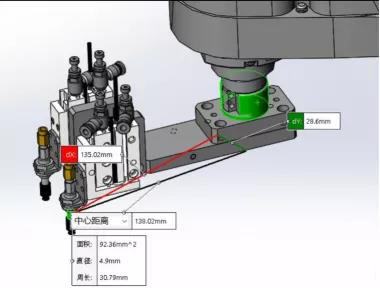
② 關于延長桿設計,需求如上文所述,接下來說明延長桿設計對CT的影響。
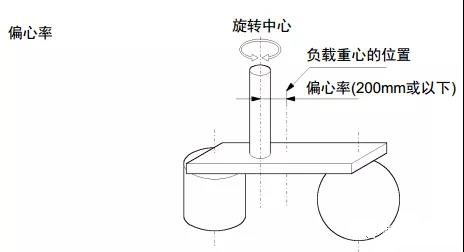
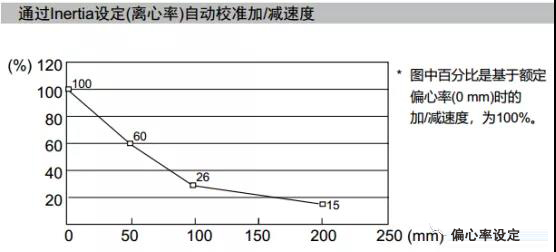
延長桿設計反映在機器人參數,為離心率(參照如下圖示)。
請務必將負載(夾具末端重量+工件重量)的離心率控制在200 mm以下。 LS10-B系列機,其他型號需要查詢對應機器人手冊。器人的設計不對應超過200 mm的離心率。另外,請務必根據離心率情況設定離心率參數。如果在離心率參數中設定小于實際離心率的值,則可能會導致發生錯誤或沖擊,這不僅不能充分發揮性能,而且還可能縮短各機構部件的使用壽命或因皮帶齒輪跳動發生位置間隙的可能性。
離心率不會影響最大速度,但會影響加減速。具體曲線如下所示(以LS10為例,其它機型請查閱對應機器人手冊):
③關于慣性力矩的說明:
影響機器人CT的還有一個因素即慣性力矩
慣性力矩計算方法:
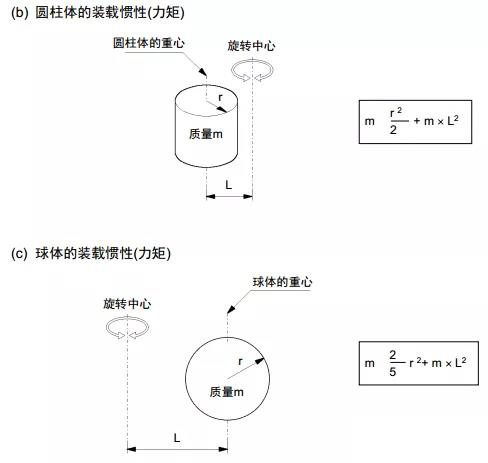
?
當然,更復雜的機構,需要機械工程師利用設計軟件協助計算。
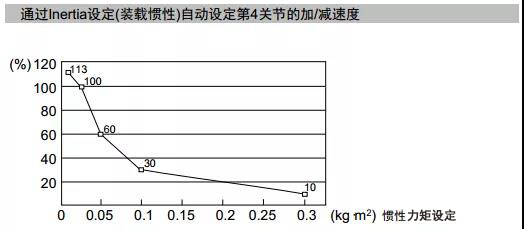
慣性力矩對CT的影響:
④關于第三關節自動加減速的說明:
當第3關節(Z)處于高位情況下,在水平PTP動作期間移動機器人時,動作時間將更快。當第3關節低于某點時,便會利用自動加/減速度來減小加/減速度。(請參閱下圖)軸的位置越高,動作加/減速度越大。但在上下移動第3關節時就需要更長時間。請在考慮當前位置與目標位置之間的關系后再調整機器人第3關節的位置。利用Jump命令在水平動作期間實現的第3關節上限可通過LimZ命令進行設定。
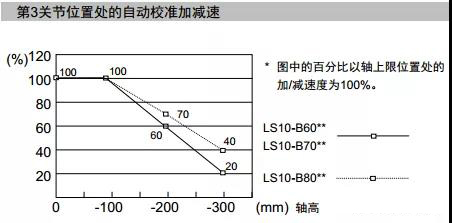
從上面可以看出,高度方向,設計在-100mm范圍內使用是最優的(以LS10為例,其它機型請查閱對應手冊)。
4.根據工藝要求確定核對機器人的最大速度、精度、IP、ISO、防爆等。
①速度(此項工作需要一定工作經驗的技術工程師執行)
經過上面3步初步選定了機器人型號,比如選定了LS6-502S(6kg負載,500mm臂長,離心率最大150mm),接下來需要在EPSON機器人軟件(后續簡稱RC+軟件)進行仿真(包括是否干涉、CT是否滿足),如果有干涉,需要把機械圖紙(只保留機器人相關部分)導入RC+軟件檢查確認干涉的處理。如果沒有干涉,那就更簡單,提供機器人工作位置信息即可,如下為示例:

最后一行即為循環CT,與技術規格書要求的CT進行對比,如果滿足,則OK,如果不滿足,則需要重新選擇更快的機器人、改變布局或者減少末端重量、減小慣性力矩、縮短工作距離、減小離心率等措施;
②精度、IP、ISO等查閱選型手冊即可;
③關于防爆,EPSON機器人目前沒有防爆機型。
5.根據實際需要選擇外圍設備(如視覺系統、擴展通信口、示教單元、力覺傳感器等)
機器人本體選定后,控制器基本也確定。接下來需要確定以下外圍設備:
① 通訊方面,EPSON控制器自帶24輸入/16輸出,TCPIP、RS232、Modbus-TCP從站,這些是否夠用?如果不夠,考慮增加IO板卡或與上位機對應的總線板卡(選件,另外購買);
② 客戶現場是否需要示教器,目前有TP2/TP3可選,TP2進行簡單的示教操作,TP3可實現編程操作;
③系統是否有視覺需求,如有,EPSON有對應的視覺產品:獨立控制器CV2系列或計算機視覺PV1,此時需要聯絡EPSON服務商做進一步溝通;
④ 系統是否有壓力傳感器需求。愛普生壓力傳感器作為一種觸覺產品,目前具備力覺坐標系、力覺控制、力覺觸發、力覺監控等功能,也請聯絡EPSON服務商做進一步溝通。
⑤ 其他需求,請聯絡EPSON廠家或服務商咨詢。
總結:通過以上內容,我們了解到工藝、負載、夾具離心率、慣性力矩、路徑規劃、視覺、力覺等對于機器人性能的發揮起著至關重要的作用,在設備設計初期,我們通過對項目整體的把控,選擇一款合適的機器人,對于項目的成功起到事半功倍的作用。
(周一至周五 8:30-18:00)
周末及節假日請聯系18015501787
 訂閱官方微信 了解最新資訊
訂閱官方微信 了解最新資訊
?2018 蘇州鎰升機器人科技有限公司 版權所有蘇ICP備19012241號-1技術支持:
(周一至周五 8:30-18:00)
周末及節假日請聯系18015501787
訂閱官方微信 了解最新資訊
?2018 蘇州鎰升機器人科技有限公司 版權所有蘇ICP備19012241號-1技術支持:

