

優傲機器人
優傲機器人UR3、UR5、UR10協作式工業機器人機械手臂優質經銷商-鎰升機器人

EPSON機器人
EPSON機器人|愛普生機器人,Scara/6軸/控制器
優傲機器人UR3、UR5、UR10協作式工業機器人機械手臂優質經銷商-鎰升機器人
EPSON機器人|愛普生機器人,Scara/6軸/控制器
J1軸原點位置
J1軸的0脈沖方向和機器人的X軸的正方向重合


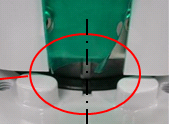
J2軸原點位置
J2軸的0脈沖方向和J1軸直線對齊

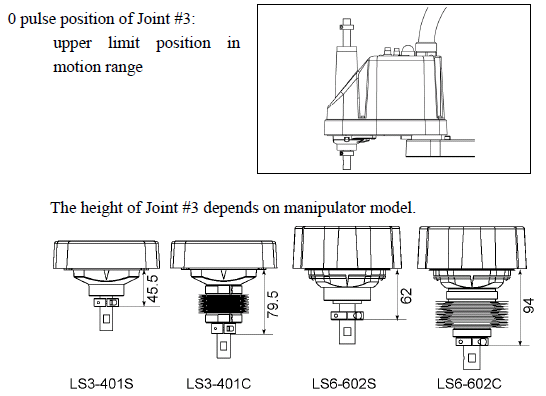
J3軸原點位置
J3軸的0脈沖位置接近最上運動范圍

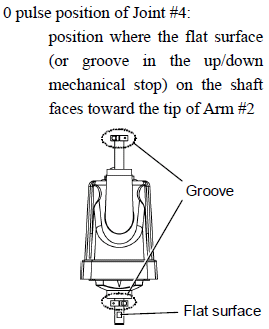
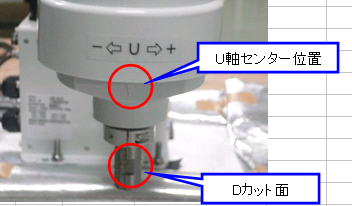
J4軸原點位置
J4軸0脈沖位置用絲桿上面的平面或限位環上面的槽對準#2手臂前端的倒三角標記
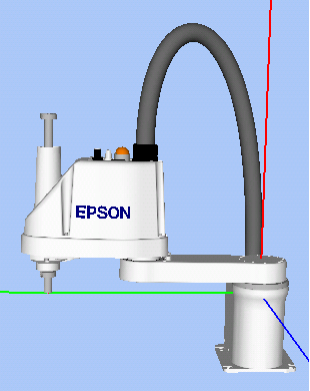
所有軸都在原點位置時機器人的姿勢
1.將機械手運動到以上姿勢后(可以釋放所有手動移到正確的原點也可以進行軟件操作移動關節回到原點),在Epson的RC軟件里面的命令窗口進行以下操作
1.在命令窗口輸入calpls 0,0,0,0 點回車
2.再在命令窗口輸入calib 1,2,3,4 點回車 此時原點校正完畢
3.驗證原點是否校正好:在命令窗口輸入 pulse 0,0,0,0 如果機械手回到上圖所示姿勢(即原點位置),說明原點校正正確。
(周一至周五 8:30-18:00)
周末及節假日請聯系18015501787
 訂閱官方微信 了解最新資訊
訂閱官方微信 了解最新資訊
?2018 蘇州鎰升機器人科技有限公司 版權所有蘇ICP備19012241號-1技術支持:
(周一至周五 8:30-18:00)
周末及節假日請聯系18015501787
訂閱官方微信 了解最新資訊
?2018 蘇州鎰升機器人科技有限公司 版權所有蘇ICP備19012241號-1技術支持:

